

 联系我们
联系我们

安川机器人控制柜通过选择模拟量通信基板实现模拟量功能。例如,DX200控制柜的Jancd-YEW01-E基片就具有双向模拟量输入和双向模拟量输出。

CN322
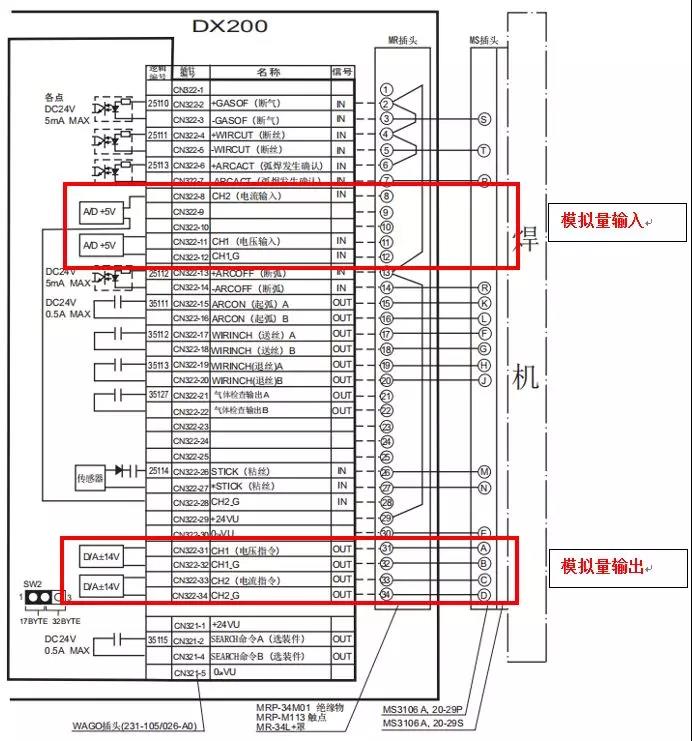
模拟量输入/输出
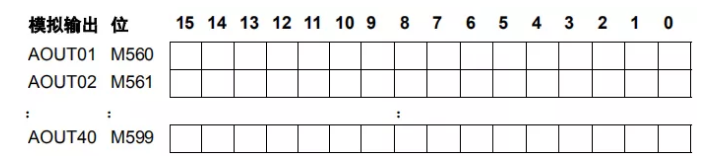
1)模拟量输出寄存器
DX200默认40个16位的模拟量输出寄存器(M560~M599)
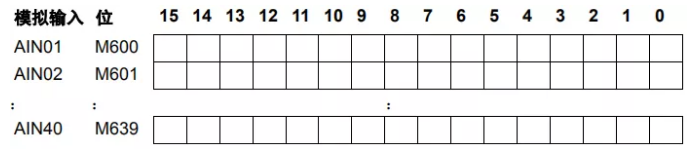
2)模拟量输入寄存器
DX200默认40个16位的模拟量输入寄存器(M600~M639)
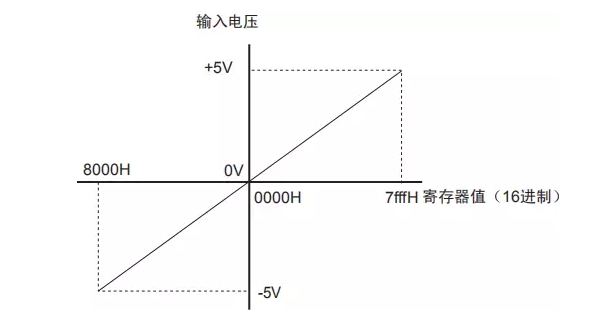
3)输入端的电压范围是-5V到+5V;
每1V的寄存器数值分辨率是【1V=32767/5=6533】;
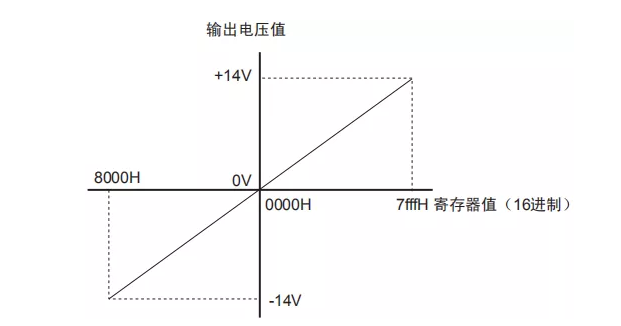
4)输出端的电压范围是-14V到+14V;
每1V的寄存器数值分辨率是【1V=32767/14=2340】;
5)机器人程序中使用实例
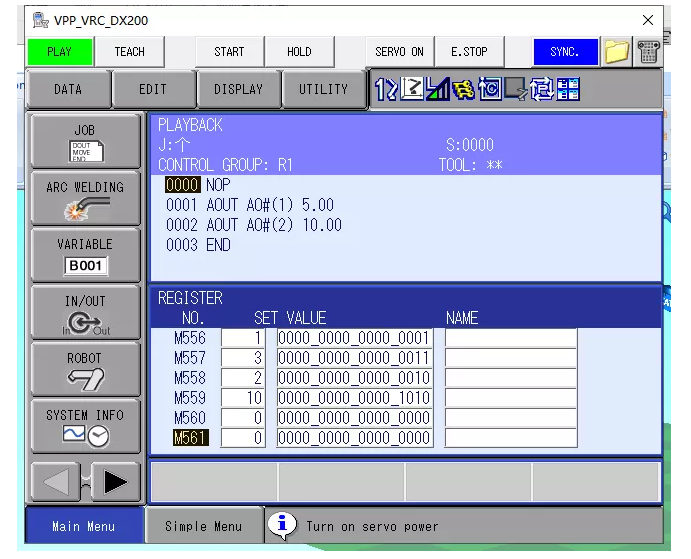
运行前

运行后可以根据以上程序中的实例,进行编程测试。
安川机器CC-
01 机器人通讯地址说明
机器人外部I/O分为两类:
1)、本地硬件IO:
20010 — 20057:40点输入
30010 — 30057:40点输出
2)、远程总线IO:20060 — 21287,30060 —31287
20060 — 20067,30060 —30067:通讯的状态信号
20070 — 21287,30070 — 31287:作为通讯地址使用
02 常用通讯基板说明
基板分类:不同的通讯方式对应不同的基板
三菱:常用CC-
西门子:常用Profibus_DP和Profinet通讯方式
AB:常用Devicenet和Ethernet_IP通讯方式
欧姆龙:常用Devicenet和Ethernet_IP通讯方式
(具体型号可向供应商咨询)
03 SST-CCS-PCU通讯基板设定说明
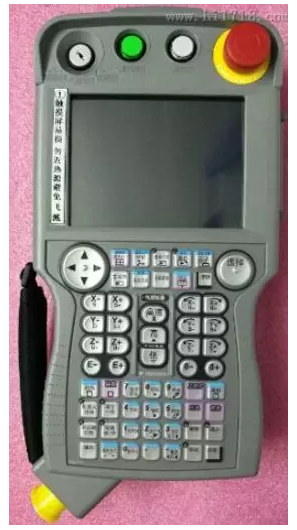
1)、设置步骤如图所示,按住“主菜单”开机进入维护模式;
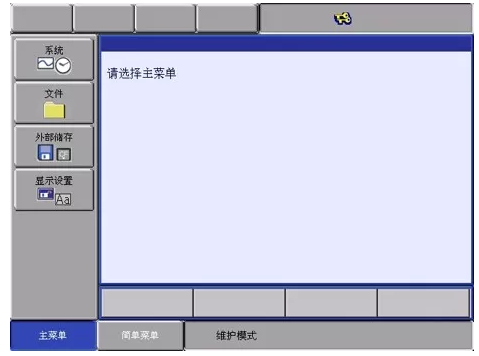
2)、进入管理模式;

3)、选择“设置”;

4)、选择“选项基板”;

5)、若为CC-

6)、选择使用,占用站数选择“4”,根据软件设置填写站号;

7)、按下回车键,选择“是”(以下设置图片显示为AB3601,CC-

8)、按下回车键;

9)、按下回车键,选择“是”,设置完成。

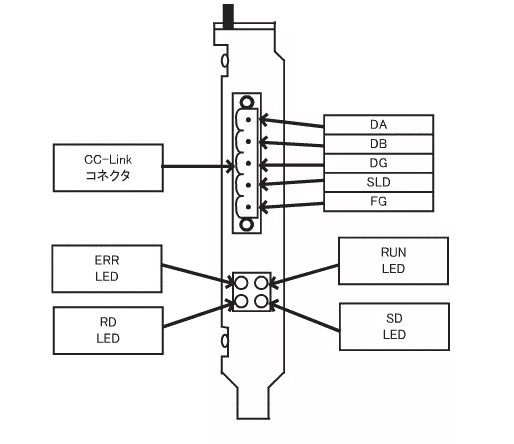
04 SST-CCS-PCU
1)、外观;

2)、基板接线及指示灯;
以上内容转载于网络
更多:安川机器人
