

 联系我们
联系我们

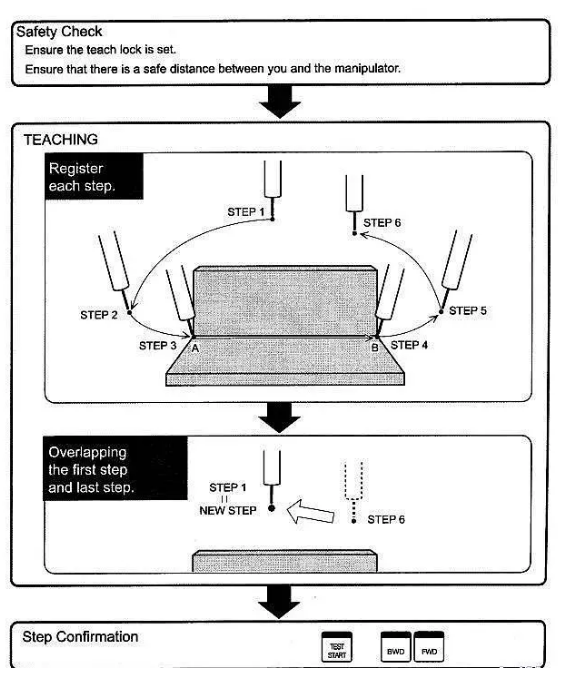
示教:
作业说明:作业是指机械手要完成的任务的工序。程序是使用机器人编程语言创建“通知Ⅱ”。
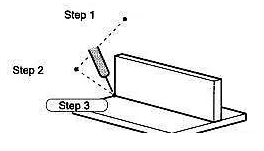
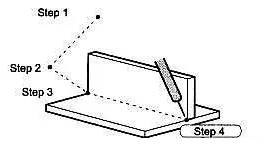
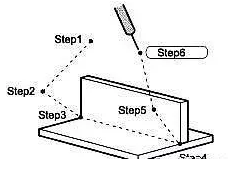
下面的例子将展示机械手如何学习如何做。如下图所示,这个例子说明了将机器人从工件的A点移动到b点所需要的步骤,完成这个任务有6个步骤。
路径确认;
使第1步与后一步一致;
记录每一步;
安全检查;
确保教学模式的锁定;
确保你和机械手之间有一个安全的距离;
步骤1——开始位置
始终要注意,机械手在操作前确保有一个安全的工作区域。
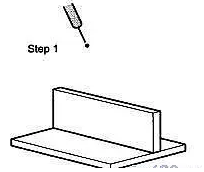
(1)握紧手握急停开关,这时伺服电源打开,机械手可以操作了。
(2)按轴操作键,移动机械手到预期的位置,要确保位置安全,并且使工作区域适合于作业编程。
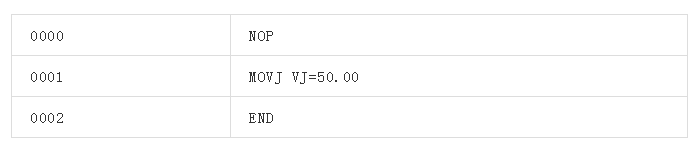
(3)用[MOTION TYPE]键选择关节运动方式,使关节运动指令“MOVJ”显示在输入窗口中。

= > MOVJ VJ=0.78
(4)移动光标到行数0000处,按下[SELECT键。 
J: TEST S:000 R1 TOOL: *
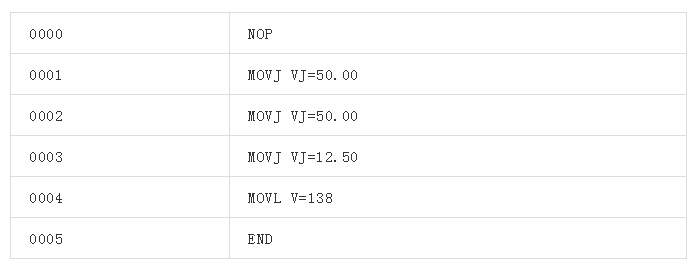
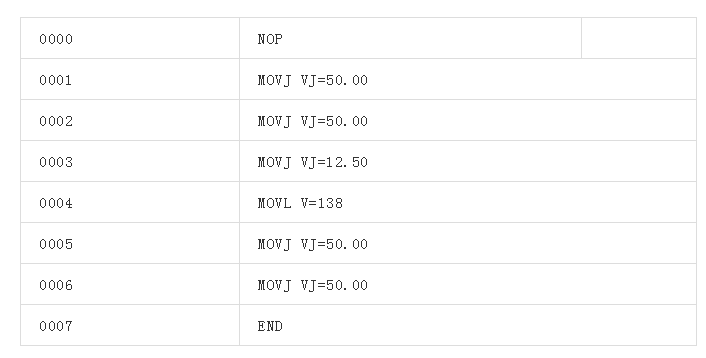
0000 NOP
0001 END
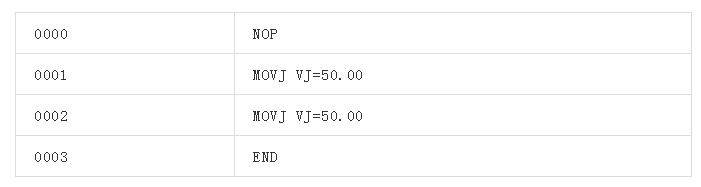
(5)在输入窗口中,将光标移至右边的VJ=*.**处,该处表示速度,然后按住[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合适的速度。
= > MOVJ VJ=50.00
(6)按确认键[ENTER] ,记录下步骤1(行号0001)。
步骤2——靠近开始作业位置
首先调整机械手的工作姿态
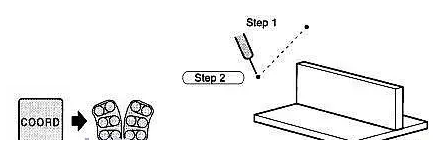
(1)用轴操作键将机械手移至接近开始作业的位置。
(2)按确认键[ENTER] ,记录下步骤2(行号0002)。
步骤3——开始作业位置
按照步骤2的姿势,将机械手移至开始作业的位置。
(1)[FST]或[SLW]键得到一个中等速度,状态区中的速度图标显示为  形状。
形状。 

(2)不要改变步骤2中的姿势,按[COORD]键选择直角坐标,用坐标轴操作键将机械手移至开始焊接点。
(3)将光标移到行号0002处,按[SELECT]键。
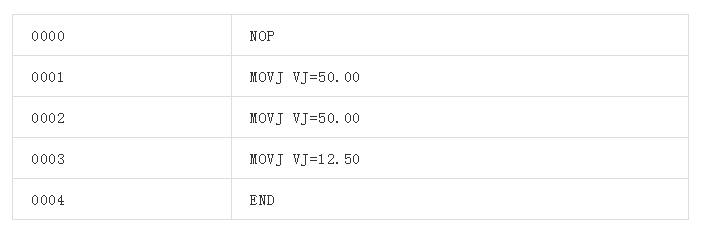
(4)在输入窗口中,将光标移至右边的VJ=*.**处,该处表示速度,然后按住[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合适的速度。将速度设为12.50%。
= > MOVJ VJ=12.50
(5)按确认键[ENTER] ,记录下步骤3(行号0003)。
步骤4——作业结束点
指定作业结束点
(1)用坐标轴操作键将机械手移至工作结束点。
(2)按[MOTION TYPE]键,选择直线运动类型(MOVL)。
= > MOVL V=66
(3)将光标移至行号0003,并按[SELECT]键。
= > MOVL V=66
(4)在输入窗口中,将光标移至右边的V=*.**处,该处表示速度,然后按住[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合适的速度。将速度设为138cm/min。
= > MOVL V=138
(5)按确认键[ENTER] ,记录下步骤4(行号0004)。
步骤5——离开工件和夹具位置
将机械手移至一个不会撞击工件或夹具的位置。
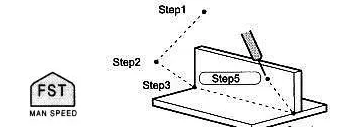
(1)按[FST]或[SLW]键,将速度改为高速。

注意:该速度只影响示教速度,再现速度由步骤4定义。
(2)用坐标轴操作键将机械手移至一个不会撞击夹具的位置。
(3)按[MOTION TYPE]键设置节点运动类型[MOVJ]。
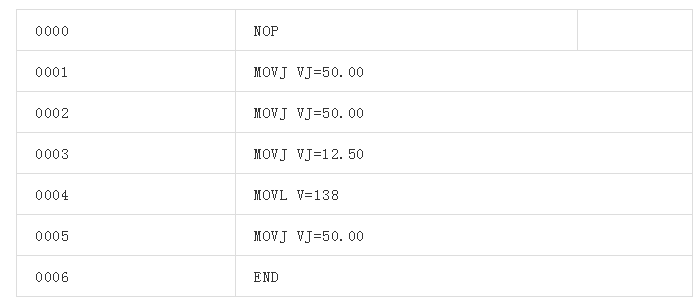
= > MOVJ VJ=12.50
(4)将光标移至行号0004处,按[SELECT]。
= > MOVJ VJ=12.50
(5)在输入窗口中,将光标移至右边的VJ=*.**处,该处表示速度,然后按住[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合适的速度。这里将速度设为50%。
= > MOVJ VJ=50.00
(6)按确认键[ENTER],记录下步骤5(行号0005)。
步骤6——接近开始点
将机械手移至接近开始点
(1)用坐标轴操作键将机械手移至接近开始点。
(2)按确认键[ENTER] ,记录下步骤6(行号0006)。
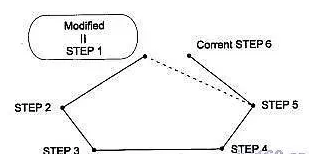
确保第1步和后一步一致:
机械手在步骤6就停了,步骤6必须与步骤1十分接近。尽量是直接从步骤5的端点位置移至步骤1,这样机械手可以很快有效地开始下一个焊接作业。
下面的操作将使步骤6(结束点)和步骤1(开始点)一致。
(1)将光标移至步骤1(行号0001)。

(2)按[FWD]键,机械手将移至步骤1。

(3)将光标移至步骤6(行0006)。
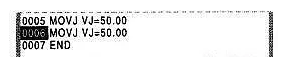
(4)按[MODIFY]键。

(5)按确认键[ENTER]。这样就能将步骤6的位置改为与步骤1的位置相同。
小结与提高
(1)步骤:手握开关打开伺服电源→移动到位→选择运动指令形式→修改速度→确定;
(2)坐标类型切换[COORD];
(3)运动指令形式切换:[MOTION TYPE];
(4)修改任一行的再现运动速度;
1.光标移到修改行的指令处
2.按下[SELECT],把这一行移到输入缓冲行
3.把光标移到VJ=xx.xx处,按[SELECT]键,系统出现提示符,输入新的速度值或者按[SHIFT]+光标键,修改速度值
4.[ENTER]确认
(5)修改任一行的运动指令;
1.把光标移到修改行,再移到指令处,
2.按[SELECT]
3.按住SHIFT键+光标键,改变运动指令
4.[ENTER]键确认
路径确认
作业编程完成时,要分别检查每一步,确保没有问题。
(1)将光标移至步骤1(行0001)。

(2)按[FST]或[SLW],使速度改为中等速度。

(3)按[FWD]键,确认机械手执行的每一步,每当按下[FWD]键,机械手就移动一步。
(4)逐步完成路径检查后 ,将光标移至作业开始处(0001行)。
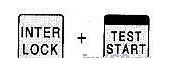
(5)同时按住[INTER LOCK]键和[TEST START]键,连续地执行所有步骤。机 械手连续走完所有步骤,直到循环结束时为止。
修改一个作业
注意:在修改作业后,需要重新确认路径。
修改作业之前:确认机械手每一步的运动。如果需要调整作业位置,增减步骤,首先要按下面步骤显示作业内容。
在顶部菜单中选择{JOB},并选择子菜单中的{JOB}项。

确保已打开示教模式。

改变位置数据:比如改变步骤2中的位置数据。
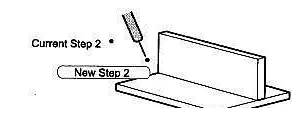
(1)按[FWD]键,将机械手移至步骤2(0002行);
(2)用坐标轴操作键,将机械手移至调整位置;
(3)按[MODIFY]键;
(4)按确认键[ENTER],即可改变步骤2中的位置数据。
增加步骤:在步骤5和步骤6之间增加一个新的步骤。
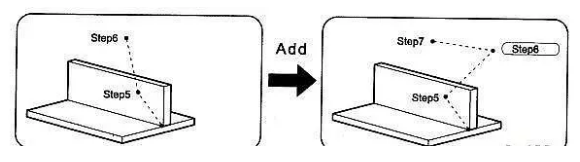
(1)按[FWD]键将机械手移至步骤5(0005行);

(2)用坐标轴操作键,将机械手移至希望插入的作业位置;
(3)按[INSERT]键;

(4)按确认键[ENTER]键,即可插入该步骤。当增加完步骤后,行数将会自动调整。
删除一个步骤:删除刚才增加的那个步骤
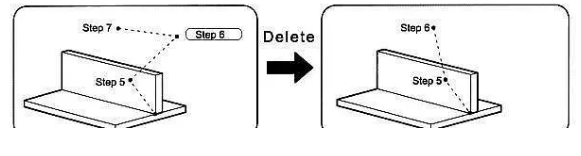
(1)用[FWD]键将机械手移至步骤6(0006行);
(2)确认光标在想删除的步骤上,然后按[DELETE]键;

(3)按确认键[ENTER],即可删除这一步。
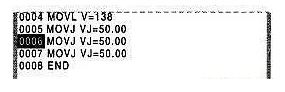
改变各步骤间的速度:改变机械手速度,比如减慢步骤3和步骤4间的速度。
(1)将光标移至步骤4(0004行);
(2)将光标移至指令处,然后按[SELECT]键;
(3)在输入窗口中,将光标移至右边“V=123”处,该处表示速度,然后按[SHIFT]键,同时上下移动光标键(改变作业再现速度),直到得到合适的速度;设置速度为66cm/min;
(4)按确认键,即可改变速度。
转载于:机器人在线
更多:安川机器人
